



Location(地点)
Team(手术团队)
Patient(患者)
Background(手术背景)
● 在神经外科中,机器人辅助技术在刚性手术固定、精准立体定向定位以及手术轨迹规划方面取得了显著进展。ExcelsiusGPS机器人系统于2017年获FDA批准用于椎弓根螺钉和椎体间植入,2021年进一步获批用于颅脑立体定向应用。其在癫痫患者中的临床安全性和有效性已得到验证,但在神经肿瘤患者中的应用证据仍有限。
● 研究回顾性分析了19例成年神经肿瘤患者,这些患者在ExcelsiusGPS机器人和术中CT辅助下接受了颅内活检和/或激光间质热疗(LITT)。
Technique(技术)
Procedure(手术过程)
1.术前规划:使用1mm层厚T1加权增强MRI(必要时融合CTA)规划手术轨迹,确保避开血管和功能区。影像数据上传至ExcelsiusGPS软件,由主刀医生确认手术轨迹(图1A)。
2.术中注册与定位:患者全麻后固定于Mayfield头架,进行立体定向注册。安装动态参考基座框架阵列和术中CT装置(ICT)(图1B)。将术中CT与术前MRI融合,使用自由手导航探头确认解剖精度并标记轨迹入口点。
3.机器人校准:调整机器人位置,使其达到支持手术通路和术中CT的最佳位置(图1C)。机器人被拉回无菌区域外,患者准备并覆盖无菌布后,机器人被重新放置到优化位置。

图1. A:Globus ExcelsiusGPS:系统。左侧为自由站立的机器人臂,配有末端执行器和导航显示器;右侧为软件导航所用的相机;B:动态参考基底框架(右侧)和术中CT装置(左侧)固定于Mayfield头架,背景可见术中CT;C:机器人位置经调整后,达到支持手术通路和术中CT的最佳位置。
4.手术执行:机器人被激活,刚性执行臂被定位以支持计划轨迹。使用3.2mm适配器在机器人臂支持下钻孔。穿刺针或LITT探针被推进到预定深度,术中CT用于确定立体定向的准确性。如果目标点的径向误差小于2mm,则继续计划的活检或LITT;如果径向误差超过2mm,则在继续之前进行进一步排查。对于立体定向穿刺活检(SNB),直到神经病理学确认获得病理组织后才终止手术。接受LITT手术的患者随后被送往诊断性MRI室进行LITT治疗。
下附典型病例:
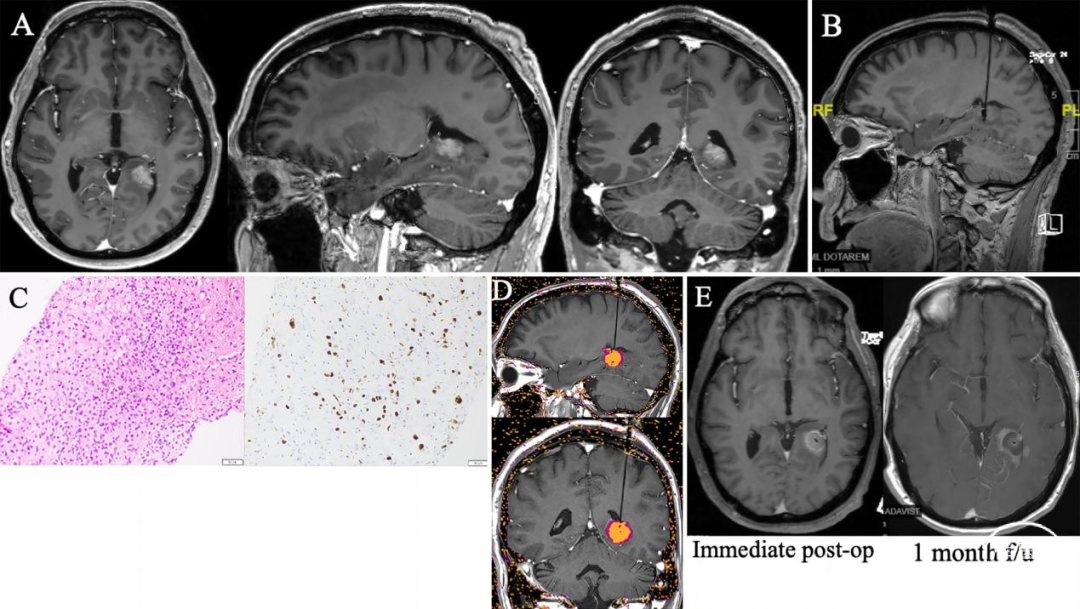
● 患者3,57岁男性,诊断为胶质母细胞瘤(MGMT启动子未甲基化),完成替莫唑胺联合放疗及6个周期的替莫唑胺治疗后,出现左侧枕叶内侧对比增强病灶(10×13×14mm)(图2A)。灌注成像显示脑血流量增加,弥散成像显示该区域信号增强。患者接受经顶叶脑室活检,术中CT确认手术轨迹(入口和靶点径向误差均为0.2mm)(图2B)。冰冻病理提示胶质母细胞瘤复发,最终病理学检查结果一致(图2C)。随后进行激光间质热疗(LITT),病灶消融效果良好(图2D)。患者术后神经功能稳定,次日出院。1个月随访MRI显示消融腔,LITT实现局部控制(图2E)。
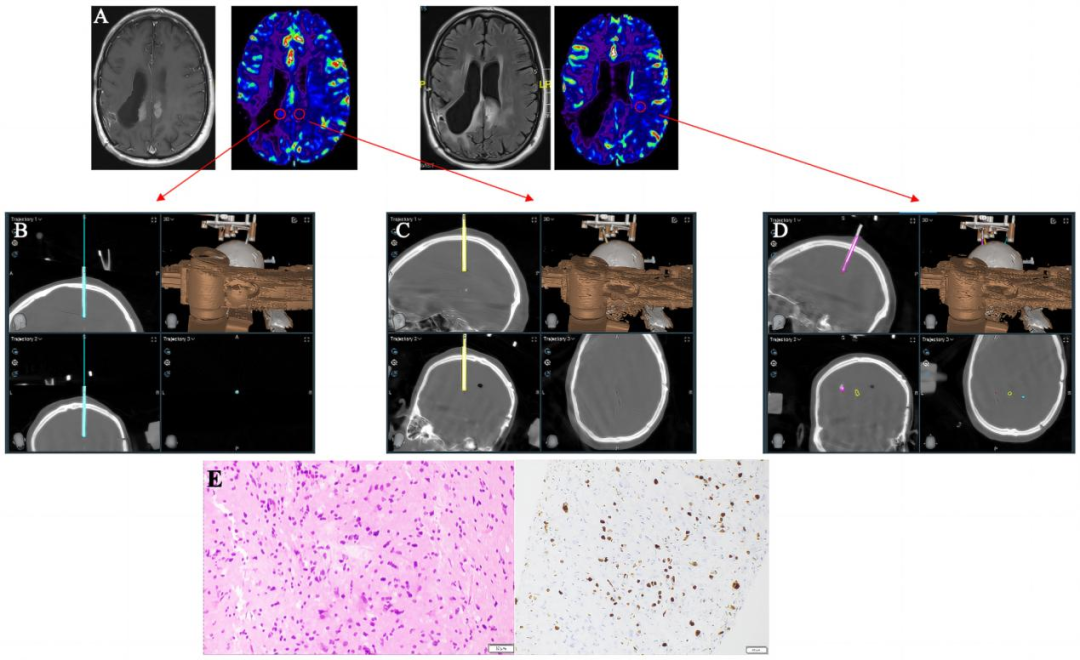
● 患者9,63岁男性,诊断为MGMT启动子甲基化型胶质母细胞瘤,完成替莫唑胺联合放疗及6个周期的替莫唑胺治疗后,22个月内未见疾病进展。随后MRI发现3处病灶:1)右侧脑室旁对比增强区(17×6×12mm),灌注成像显示血容量增加,弥散成像无信号;2)左侧脑室旁对比增强区(13×9×15mm),灌注成像和弥散成像均无异常;3)左侧脑室旁弥散信号区(12×5×7mm),无对比增强,但灌注成像显示血容量增加(图3A-D)。经多学科会诊,建议对3处病灶进行活检。在与患者及家属讨论多轨迹手术的风险和收益后,获得知情同意。手术时规划了3条不同轨迹(见图3B–D)。该多轨迹手术的立体定向设置时间为50分钟,与单轨迹手术相当。术中CT显示3条轨迹的入口和靶点径向误差均小于0.5mm(图3B–D)。冰冻病理分析提示第二个靶点存在肿瘤复发,最终病理学检查结果一致(图3E)。术后常规CT显示活检点2有少量新出血,患者神经功能稳定。术后6小时复查头颅CT影像稳定,患者于术后第1天经康复评估后出院。
Outcome(结果)
Review(手术复盘)
● 所有需要诊断的病例(16/16)均获得明确诊断。入口点径向误差平均为0.625±0.443mm,目标点径向误差平均为0.745±0.472mm。立体定向系统设置时间为57.4±10.7分钟;SNB手术时间为71.6±41.0分钟,LITT手术时间为188.4±61.2分钟。
● 所有接受选择性手术的患者均在术后第3天出院(平均住院天数为1.38±0.619天)。30天内有2例再入院,但均与手术无关。无手术相关并发症或新的术后神经功能障碍。术后常规CT显示3/19(15.7%)患者目标部位出现新的高密度影,但未出现新的神经功能障碍。
● 机器人立体定向结合术中CT的优势在于能够在活检或LITT前实时确认轨迹,尤其适用于亚厘米级、深部或位于功能区的病变。该系统通过光学跟踪维持立体定向精度,为手术提供了更大的灵活性,但也需要学习如何根据计划轨迹优化机器人位置。
● 研究结果支持ExcelsiusGPS辅助手术在神经肿瘤患者中的安全性和有效性,但样本量小、随访时间短等限制需要在未来的研究中进一步验证。


点击二维码前往脑医汇-病例夹
查看更多精彩内容
点击二维码前往脑医汇-文献速览查看更多精彩内容
![]()
声明:脑医汇旗下神外资讯、神介资讯、神内资讯、脑医咨询、Ai Brain 所发表内容之知识产权为脑医汇及主办方、原作者等相关权利人所有。
