有些人只看事物的表面,他们问的是“为什么”;而我却想象事物从未呈现的一面,我问“为什么不?”
—— 萧伯纳
 CT和MRI应用于临床已有半个多世纪了,与早期影像早不可同日而语,但为什么临床仍然在用二维影像(胶片或数字的)?个人计算机遵循摩尔定律的发展,硬件上早已满足三维影像所需要的性能。为什么不用三维影像来定位呢?本章就简单回顾一下关于三维影像定位的方法。
CT和MRI应用于临床已有半个多世纪了,与早期影像早不可同日而语,但为什么临床仍然在用二维影像(胶片或数字的)?个人计算机遵循摩尔定律的发展,硬件上早已满足三维影像所需要的性能。为什么不用三维影像来定位呢?本章就简单回顾一下关于三维影像定位的方法。
下文所示图片均来自于3D slicer中国社区,感谢赵端允、曹玉福、霍贵通等大咖们的病例分享。该方法的定位原理十分直截了当:在三维影像上测出病变中线向后的体表距离和中线旁开距离,然后在患者头部用软尺画出同样长度的两条线,即可确定病变的位置。可以看出该方法是“直角尺/游标卡尺测距定位法”的在三维影像上的衍生,只不过借助三维影像的优势,该法省去了诸多平面上的测量步骤,简化成“一测一画”两步,减少了误差在产生。它的优点在于:1)患者不需要贴marker行二次扫描;2)不依赖于扫描基线是否规范,即使头是歪的,对三维成像也没有影响;3)操作简单迅速。它不足之处在于:1)误差来源于鼻根部位置的选择(三维影像上与患者头上)是否一致;2)中线长度以及中线旁开的距离,距离越长,误差越大,所以颞部和枕部病变并不适合此法。可以看出,该方法和二维影像标志物定位法原理一样,只不过三维影像上不论是标志物还是血肿都一目了然,相对位置关系也更容易确定。3D定位贴定位的优势在于:1)定位贴有横纵交错的小孔,提供了一个三维坐标体系,方便描画血肿的外形;2)基本适用于所有幕上浅表病变的定位;3)定位准确度比较高。3)多个定位贴联用,还可确定穿刺角度,辅助血肿穿刺(具体方法文末有链接)。它的不足之处仅在于:需要二次扫描,及简单的几步三维成像操作。
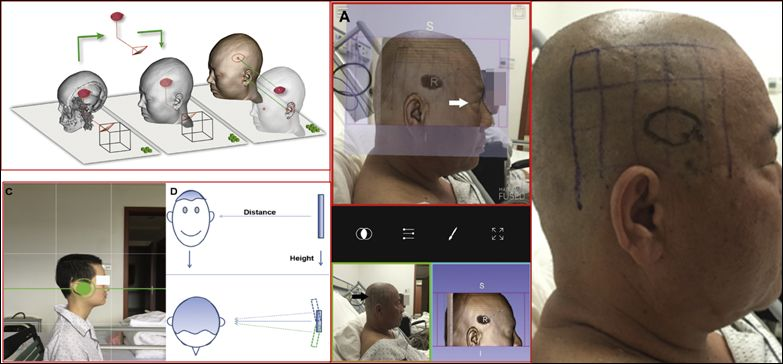
该方法的基本原理和体表标志物定位法一样,在患者头上贴标志物(上图标志物为维生素E胶丸),患者带标志物扫描MRI,在slicer中将肿瘤、周围静脉窦以及维生素E标志物一起进行三维重建,三维影像可储存在平板或电脑上,连接投影仪将三维影像投射至患者头部,VE胶丸作匹配参考,实现颅内病变肉眼可视化效果。该方法的优点有:1)利用体表标志物作匹配参考,匹配时间短,准确度较高;2)肉眼可视化效果,在场所有人都能看到;3)保持投影仪和头部的位置不变,术中也能投射。它的不足之处在于:1)需要掌握基本的三维影像重建方法;2)患者需要二次扫描,这是体表标志物定位法的基本要求;3)定位时要架设投影仪,通过有线或无线与电脑或平板连接,过程较繁琐;4)虽然是利用三维影像,但经投影仪投射后仍是二维影像,适用于颞部较平坦的位置,但对于头部弧形较大的顶枕部,图像会产生畸变,导致误差的产生。
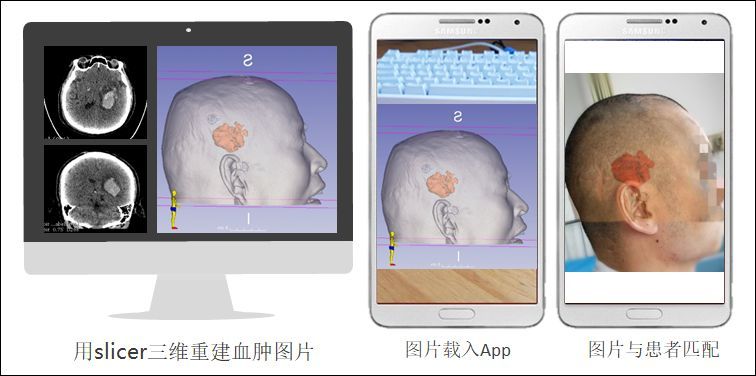
此方法的基本原理是:首先,将颅内血肿在slicer中正交投影到体表(图左上);其次,给虚拟影像和现实患者在同一角度(正侧位)拍照;最后,将两张照片在第三方手机照片编辑App上重叠,患者照片固定,虚拟影像照片通过移动、旋转去使两者重叠。重叠之后,可以看到血肿叠加在患者头部,患者头部事先画有网格线,类似坐标,根据病变在网格中的位置来定位血肿。该方法的优点在于:1)不需要二次扫描;2)影像匹配过程在手机App上完成,不需要患者全程参与;2)除了手机,不需要其他设备,在病房、手术室均可方便使用。该方法不足之处在于:1)虚拟影像的照片角度必须和患者照片的角度一致,虽然利用陀螺仪辅助,但实际操作中很难做到一致;2)存在两张照片不能匹配的情况,即:头颅轮廓匹配上时,耳廓不对;耳廓匹配时,头颅轮廓匹配不上。3)此法只适用于基底节区血肿颞部体表定位。(文献题目:iPhone-Assisted Augmented Reality Localization of Basal Ganglia Hypertensive Hematoma)第三章结尾已讲述过,此处不作赘述。Sina定位法和上面的图像重叠法的原理类似,相同之处在于:都对三维影像及患者的图片角度(正侧位)有要求;不同之处在于:图像重叠法事前确定了两张照片进行匹配,如果发现角度不对,则需要重新拍照;而Sina只确定了虚拟影像的正侧位,患者正侧方角度可以定位时实时调整。Sina法的另一个优势在于现实了患者头部血肿的实时可视化,而不是仅在照片上实现。当然,Sina法也有类似的缺点:虚拟影像轮廓和患者头部不能完全匹配。
通过上诉几种方法的介绍,不难看出:1)与二维影像定位方法相比,利用三维影像定位是一种全新的方式;2)借助投影仪、手机能实现增强现实(AR)效果;3)病变定位过程趋于可视化,直观性和准确度均有提升。
1)目前还没有全自动的三维影像重建软件,机器学习在未来能否实现这一目标,我们很期待,但目前所有三维影像的重建都需要医生自己来完成,虽然这个过程在Slicer中不复杂,但仍有很多人还不会;
2)匹配参考系的选择,目前主要有两类,一是体表标志物,二是患者体表固有解剖标志。利用体表标志物来匹配,速度快,准确度高,但代价是患者需要贴上标志物进行二次扫描。利用患者头部解剖标志(鼻子、眼睛、外耳廓等)匹配,虽然免去了二次扫描,但存在匹配度低,匹配时间长等因素,导致定位准确度下降。
3)大部分方法都有自己的适用范围,不能全面覆盖颅内病变的定位。1)3D Slicer中国社区有较全面的图文教程,短期内可以学会三维建模,并用以辅助定位。接下来,我们会在钉钉推出视频教程,这样就更加降低了学习的门槛;
2)定位的首要目标是准确,所以尽可能选择体表标志物辅助定位;至于虚拟影像不能和实体解剖标志匹配的问题,是由于不同手机的摄像头有不同的成像参数(光圈大小、光学变焦、数码变焦等),而slicer的3D视窗中也会有个隐藏的“摄像头”,它的基本参数目前是未知的,如果你的手机镜头参数与Slicer的虚拟摄像头参数接近,那么匹配误差不会太大。如果两者参数相差很远,就会出现匹配不上的情况,这是其一。其二,任何手机镜头成像时,照片的周围都会有畸变,尤其是广角镜头,这也是导致影像与与实体匹配不上的原因;其三,slicer中可以选择透视和正交两种视图,但现实中手机镜头拍摄的画面均是透视(perspective)视图,透视就存在近大远小的现象,颅内病变与患者体表并非在同一个面上(深度不同),就会出现病变匹配准时,轮廓不准,轮廓准时,病变不准的情况。
上图是我早期用Sina定位的病例,左侧用的是魅族MX5手机,可以看到虚拟头颅轮廓及外耳廓都能很好的重合,但后来用三星S7edge手机后,就很难做到完全重合,只能用Marker点辅助,当marker匹配好后,轮廓仍然是不重合的,此时应该以marker为参考点,而不能以轮廓来定位。