

法国格勒诺布尔大学的Alim Louis Benabid等通过半侵袭性技术测试使用脑信号驱动外骨骼的可行性研究,结果发表在2019年12月的《Lancet Neurol》上。
——摘自文章章节
【Ref: Benabid AL, et al. Lancet Neurol. 2019 Dec;18(12):1112-1122. doi: 10.1016/S1474-4422(19)30321-7. Epub 2019 Oct 3.】
研究背景
研究方法
研究结果
结论

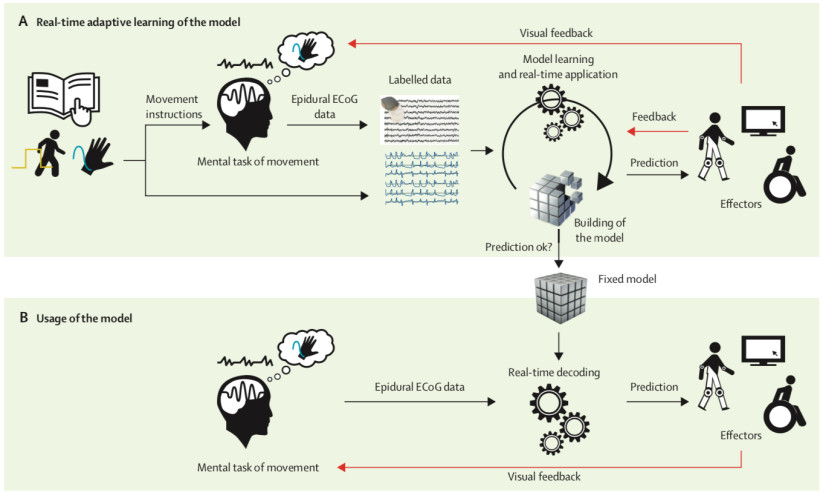
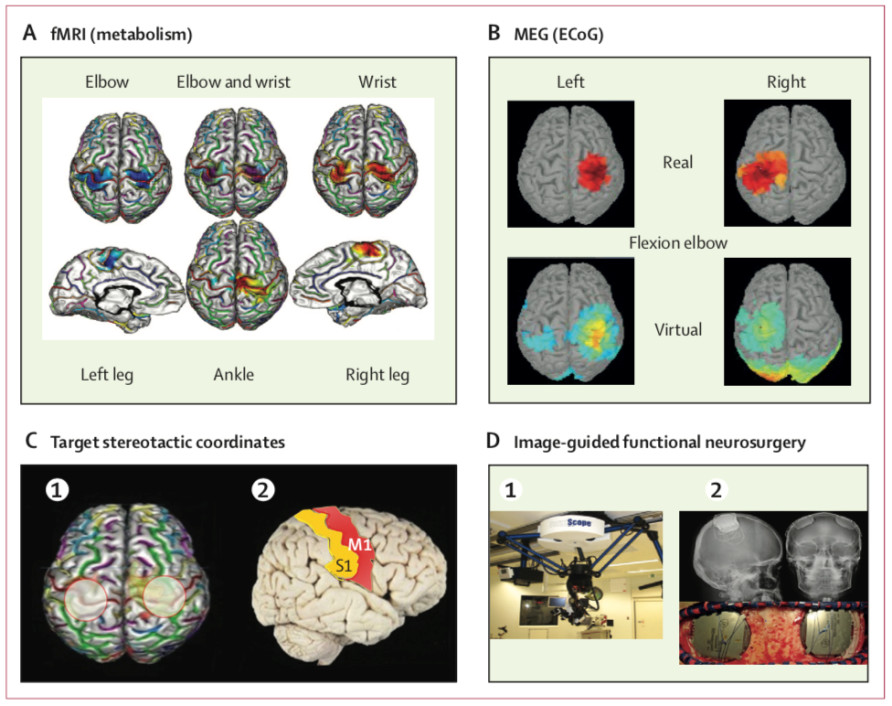
硬膜外无线脑机接口控制的外骨骼假体应用于四肢瘫患者

杨志荣
Friedrich-Alexander- Universität 医学院

杜倬婴
复旦大学附属华山医院
法国格勒诺布尔大学的Alim Louis Benabid等通过半侵袭性技术测试使用脑信号驱动外骨骼的可行性研究,结果发表在2019年12月的《Lancet Neurol》上。
——摘自文章章节
【Ref: Benabid AL, et al. Lancet Neurol. 2019 Dec;18(12):1112-1122. doi: 10.1016/S1474-4422(19)30321-7. Epub 2019 Oct 3.】
研究背景
研究方法
研究结果
结论
脑医汇 App

LINK
客户端下载
