神外资讯【中华神外】专栏,每周发布一篇精选文章,今天刊登的是由首都医科大学附属北京天坛医院神经外科刘焕光、杨岸超、刘德峰、张建国在《中华神经外科杂志》2019年第十期“脑深部电刺激术”上发表的“基于视觉定位的国产机器人辅助脑深部电刺激电极植入的精准性研究”,欢迎阅读。
摘要
目的:
探讨基于视觉定位的国产神经外科手术机器人辅助脑深部电刺激术(DBS)电极植入的精准性和安全性。
方法:
回顾性分析2018年10月至2019年6月首都医科大学附属北京天坛医院神经外科收治的15例帕金森病患者的临床资料。所有患者均在国产手术机器人辅助下行DBS,通过将术后头颅CT与术前手术规划影像融合,记录植入电极在横向(x轴)和纵向(y轴)的距离偏差。观察术后相关并发症的发生情况。
结果:
结论:
在国产神经外科手术机器人辅助下行DBS,其电极植入的误差小,且无手术相关并发症。
资料与方法
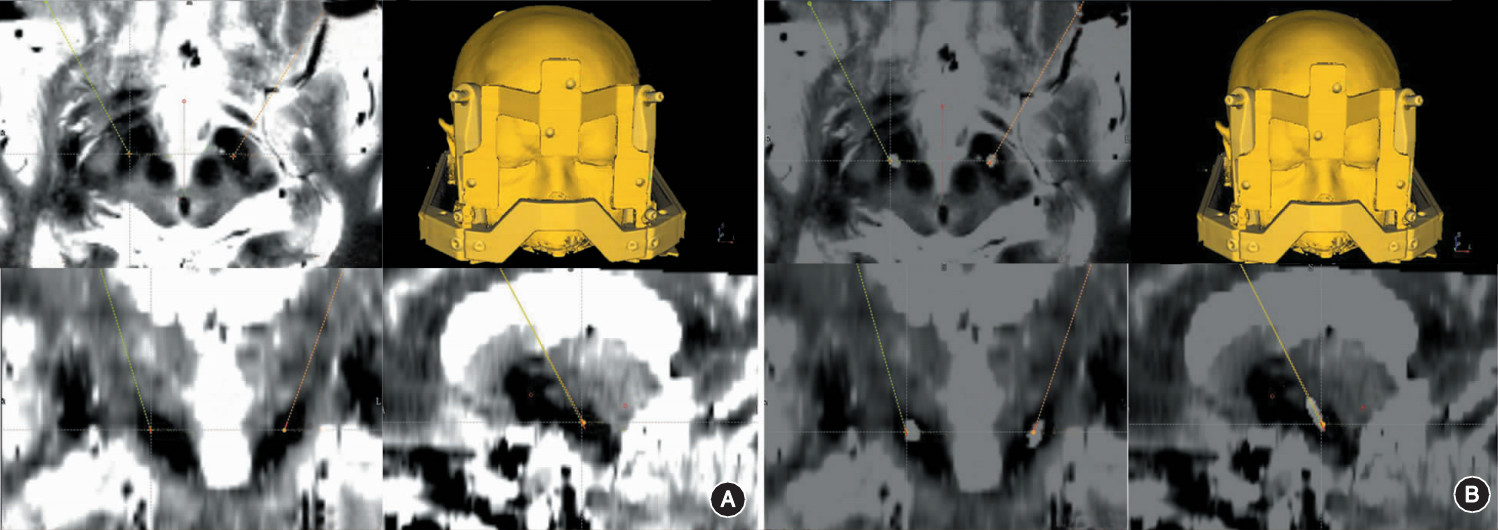
图1. 帕金森病患者应用睿米机器人辅助脑深部电刺激电极植入前、后的影像学图片。A.将术前头颅MRI与CT定位图像融合,设计靶点及手术路径;B.术后CT与术前规划影像融合结果,可见术后电极的位置与手术计划相符。
结果
15例患者共植入30根电极,其中植入丘脑底核26根,苍白球内侧部4根。15例患者的术后CT结果显示,电极植入位置满意,与术前规划图像融合后,可见DBS电极尖端位置和植入路径与术前规划基本一致。电极尖端与计划靶点在x轴上的距离偏差为(0.60±0.33)mm(0.10~1.34mm);在y轴上的距离偏差为(0.45±0.24)mm(0.02~0.83mm)。本组术后无死亡病例,无电极相关出血事件、颅内感染、手术切口愈合不良情况发生。
讨论
目前,国际上应用的机器人主要有机器人立体定向手术辅助系统(robot of stereotactic assistant,ROSA)[5]和Neuromate机器人[6],其他机器人包括Puma 200[7]、Renaissance[8]、Minerva[9]、MKM[10]、Surgiscope[11]、iSYS1[12]、RONNA G3机器人[13]。机器人辅助神经外科手术包括活组织检查、电极植入、电极毁损、立体定向抽吸、神经导航以及放疗等。国内神经外科应用的自动臂机器人系统主要为ROSA机器人[14]、睿米机器人[15]以及华科精准机器人。Remebot系统具有机械臂工作空间大、注册流程简单、摆位灵活、定位精度高等特点,其在首都医科大学附属北京天坛医院神经外科的年使用量已达300台次以上(数据待发表)。
1.机器人辅助电极植入的精准性:Vakharia等[16]在立体脑电图(stereoencephalography,SEEG)深部电极植入术的研究中发现,入颅点的平均误差为1.17mm,靶点的平均误差为1.71mm。Lefranc等[17]在ROSA机器人辅助下行SEEG脑深部电极植入术,采用表面注册法植入31根电极,平均偏差为1.22mm,最大偏差为2.17mm,其中使用头皮标记注册法植入24根电极,平均偏差为0.72mm,偏差范围为0.50~1.46mm;采用颅骨标记注册法植入7根电极,平均偏差为0.42mm,偏差范围为0.30~0.72mm。由此可见,颅骨标记注册法可能更加精准。在DBS电极植入方面,国内外以ROSA系统应用最为广泛。Neudorfer等[18]在针对DBS电极植入的研究中发现,机器人辅助和常规框架植入的精度分别为(0.76±0.37)mm(范围为0.17~1.52mm)和(1.11±0.59)mm(范围为0.10~2.90mm),两组的差异有统计学意义(P<0.001);当研究两组偏差超过2.00mm的比例时发现,常规框架植入组中,有8.75%(n=7)的电极植入偏差>2.0mm;而机器人引导的DBS植入电极偏差均未达到此阈值。此外,该研究还对手术耗时进行了比较,机器人引导的DBS[(325.1±81.6)min]与框架植入方法[(394.8±66.6)min]比较,DBS手术的耗时明显减少(P<0.001)。国内杨兴旺等[19]的相关研究结果显示,电极尖端距靶点的偏差在x轴上为(0.68±0.43)mm(0.09~2.13mm),在y轴上为(0.63±0.29)mm(0.21~1.50mm)。本研究为睿米机器人在DBS手术中的首次应用,30根电极的位置和植入路径与术前规划基本一致,x轴上的距离偏差为(0.60±0.33)mm(0.10~1.34mm),y轴上的距离偏差为(0.45±0.24)mm(0.02~0.83mm)。该结果与既往ROSA机器人的相关研究结果类似。
2.睿米机器人辅助DBS电极植入的特点:(1)头架安装相对简单,虽然该方法未能完全摆脱头部框架,但框架仅起到固定作用,相较于传统框架系统,应用睿米机器人降低了对临床医生安装头架的技术要求。(2)传统框架系统的电极植入误差可能来源于影像融合及硬件系统固有误差、框架形变误差、人工读数误差等,而睿米机器人误差仅来自于影像融合及硬件系统固有误差,精准性可能更高。(3)术中更换DBS靶点便捷,靶点更改后,机械臂可自动到达所需位置。(4)术中机械臂可严格按照术前规划路径到达规划靶点,故入颅点更精确,硬膜上的开口小,脑脊液流失和颅内积气更少,可在一定程度上提高电极植入的准确性。术后CT与术前规划图像融合后,实际电极植入路径可与规划路径基本重合,可更精准地判断电极偏差。(5)术中可通过标记物验证点对电极植入偏差进行预先评估,使电极植入更加精准。(6)无需额外作颅骨标记,相较于ROSA系统,创伤更小。(7)睿米机器人基于视觉定位注册,其注册过程可实现自动化,较ROSA系统用时更少。(8)机器人辅助手术的术前准备过程稍复杂,包括摄像头和机器人的摆位、机器人注册等。(9)ROSA系统可于术前1d固定颅骨标记,行定位CT扫描以及手术规划,Remebot系统仍需手术当日行定位CT扫描并进行手术规划。
综上所述,Remebot系统辅助DBS电极植入的整体定位精度高,具有良好的精准性、安全性以及稳定性,可基本满足临床定位的需求,值得临床推广应用。
参考文献